- Вендор: Нанософт разработка
- Постоянная лицензия: 649 700 руб.
- Срочная лицензия: 201 400 руб.
nanoCAD Облака точек
nanoCAD Облака точек — приложение к Платформе nanoCAD, предназначенное для обработки данных
Преимущества
-
Открытая архитектура
ОткрытыйAPI-интерфейс позволяет создавать уникальные инструменты для решения узкоспециализированных задач. nanoCAD Облака точек поможет выстроить рабочий процесс по индивидуальному алгоритму для достижения оптимального результата -
Широкий выбор инструментов
nanoCAD Облака точек содержит обширный инструментарий обработки данных, открывающий большие возможности при работе с облаками точек и позволяющий решить практически любую задачу -
Единая инженерная экосистема
nanoCAD Облака точек работает как вертикальное приложениеСАПР-платформы nanoCAD, что позволяет создать единую инженерную экосистему для обработки данных3D-сканирования и их дальнейшего использования в других программных продуктах -
Работа с обменными форматами
Поддержка самых распространенных обменных форматов (LAS, PTS, PTX, PCD, XYZ, E57, PLY, RCS/RCP), используемых в лазерном сканировании, позволяет работать с данными, полученными из разных источников. Больше нет необходимости подстраивать рабочий процесс под конкретного производителя оборудования
nanoCAD Облака точек 24.1 может использоваться в двух конфигурациях
Конфигурация «ReClouds»
Конфигурация «ReClouds» — компонент nanoCAD Облака точек для обработки данных
Задачи
- Предварительный анализ и обработка результатов
3D-сканирования . - Классификация и сегментация облаков точек.
- Создание ЦММ/ЦМР.
- Послойная векторизация и построение поэтажных планов.
- Поиск элементарных геометрических форм и сложных технологических систем.
- Вычисление площадей и объемов.
- Поиск геометрических коллизий.
- Трехмерное моделирование, в том числе имитационное.
- Мониторинг технического состояния объектов и экологической обстановки.
Ключевые возможности
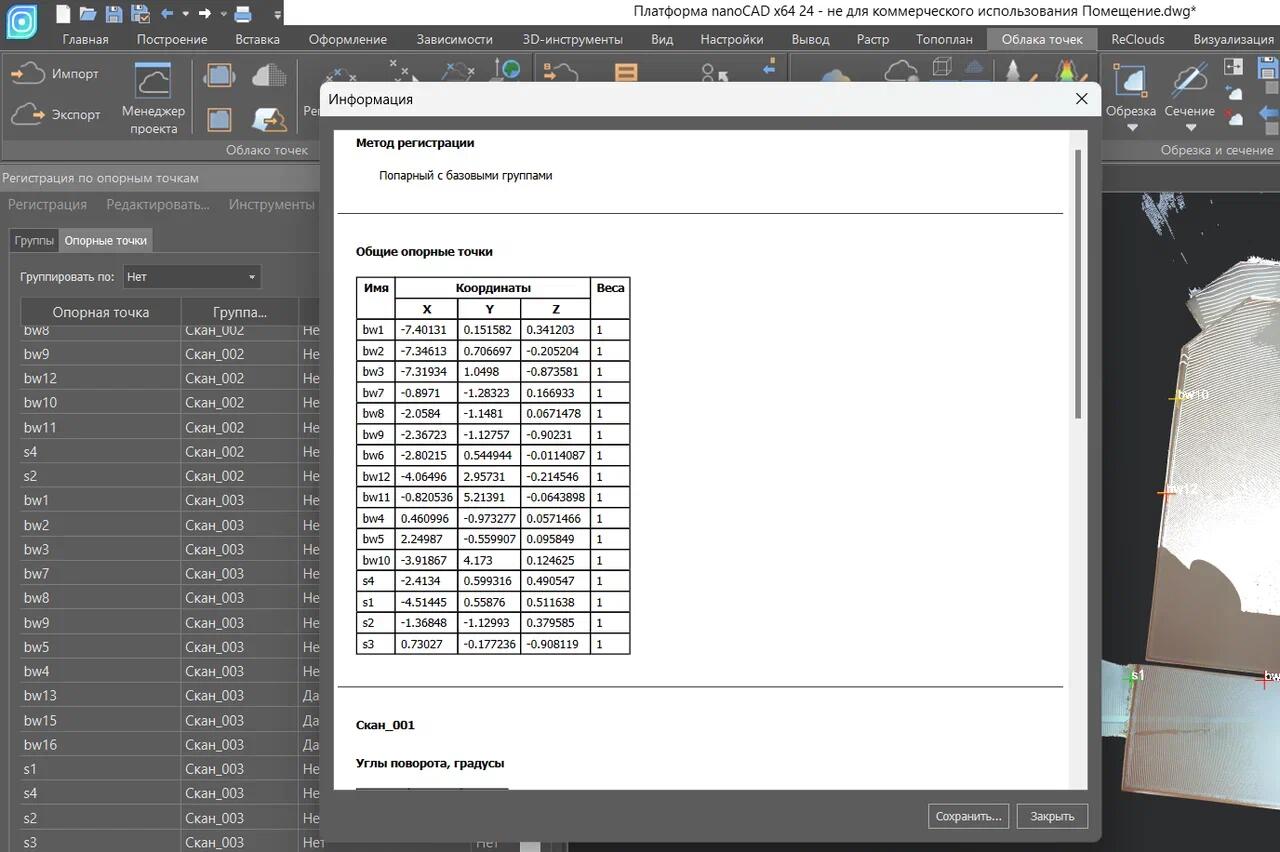
- Сшивка облаков по опорным точкам
-

Взаимное ориентирование нескольких облаков точек. Регистрация позволяет найти параметры трансформации для произвольного количества групп опорных точек. Используются два способа: попарный и итеративный.
- Проверка качества сшивки и контроль невязок
-

Контроль невязок по каждой точке позволяет оценить качество регистрации. Опорные точки с большой невязкой можно исключить или изменить вес таких точек, после чего выполнить повторную регистрацию.
- Создание облака точек из модели
-

Инструмент преобразует указанную модель в облако точек с заданной плотностью.
- Сшивка сканов по парам соответствующих точек
-

Команда позволяет провести регистрацию облаков вручную, указав пары соответствующих точек на экране.
- Совмещение облака с моделью
-

Команда выполняет детальное совмещение облака точек с эталонной моделью при наличии относительно небольшого смещения.
- Прореживание облаков точек
-

Команда уменьшает количество точек в выбранном облаке и позволяет избавиться от избыточной насыщенности, которая может существенно увеличивать время обработки больших облаков.
- Фильтрация данных
-

Настройка фильтров атрибутов (метаданных) и классов точек импортируемых файлов.
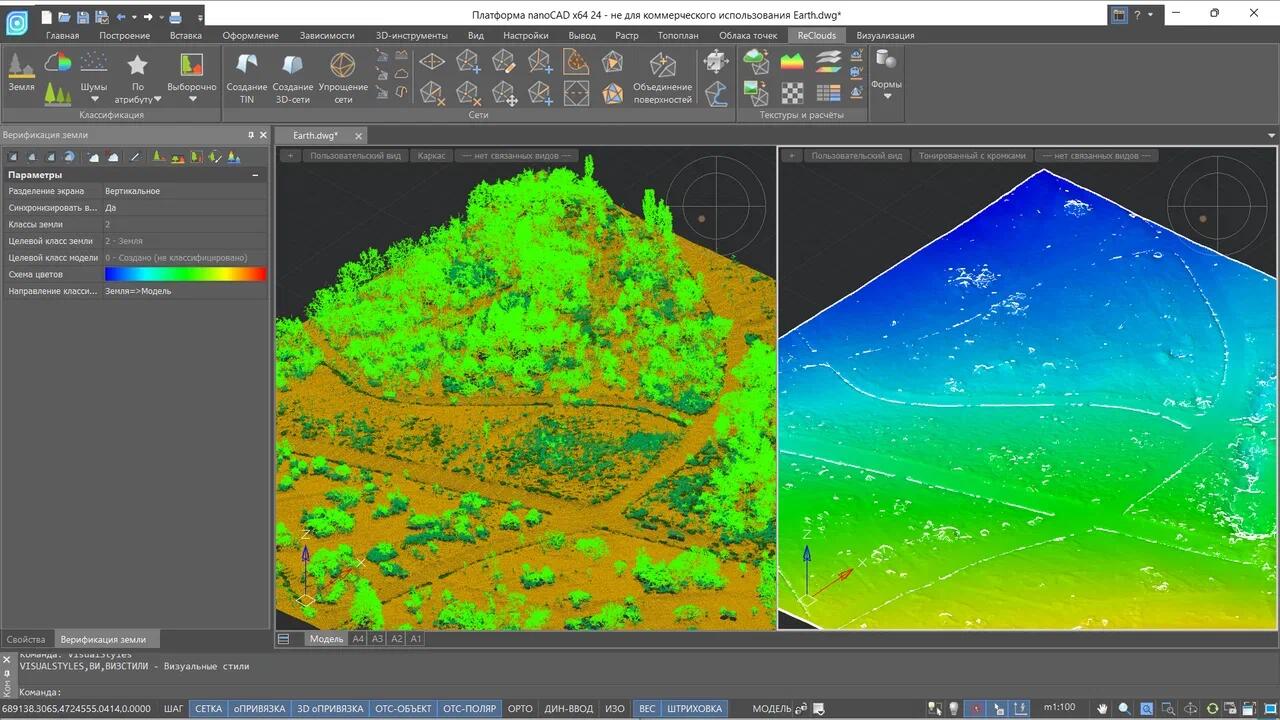
- Классификация и верификация земли
-

Алгоритм автоматической идентификации земли, а также команда верификации земли, обеспечивающая ручное уточнение автоматически классифицированных точек.
- Именованные виды
-

Команда сохраняет сегменты облака точек, полученные в результате работы инструментов создания обрезки или сечения.
- Создание и перенос сечений
-

Команда осуществляет параллельный перенос любого сечения в выбранном видовом экране с заданным шагом вперед или назад.
- Классификация сечений по атрибуту
-

Обширный набор инструментов и параметров для автоматической классификации по заданному критерию.
- Классификация точек в облаке
-

Классификация точек, расположенных в заданном диапазоне высот относительно поверхности земли. Также возможна классификация любых объектов по высоте от поверхности земли (конструкции, здания, опоры ЛЭП и др.).
- Послойная векторизация
-

Автоматическое построение множественных сечений облаков с заданным шагом, их последующая векторизация и создание растровых изображений.
- Построение поэтажного плана
-

Создание векторного поэтажного плана по данным облака точек. Облако может состоять из наружного скана здания и сканов его внутренних помещений.
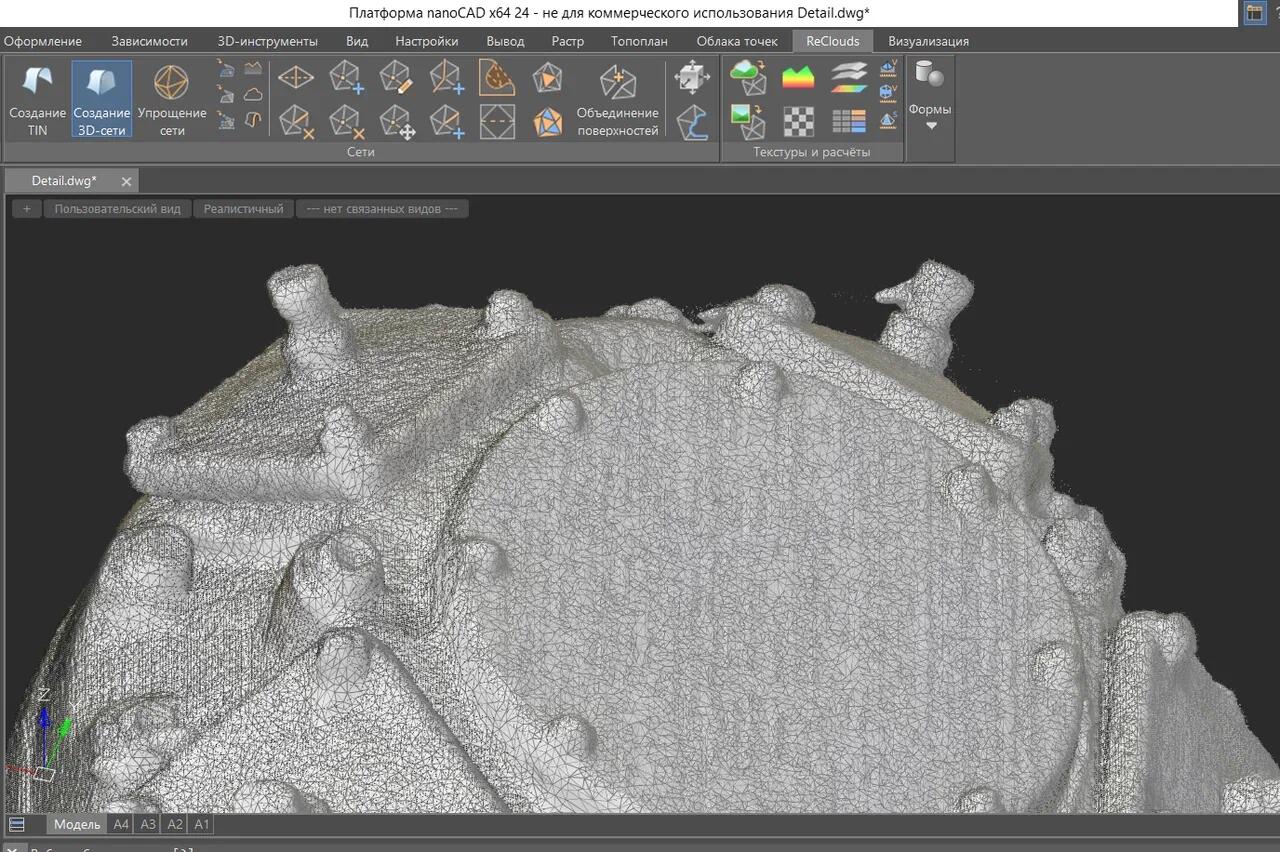
- Создание 3D-сети
-

Команда выполняет
3D-триангуляцию облаков точек объемных объектов с построением сети. Может использоваться для триангуляции зданий и других наземных объектов.- Создание TIN
-

Команда создания нерегулярной триангуляционной сети на основе облака точек. Построенная сеть представляет собой набор ребер, формирующих непересекающиеся треугольники.
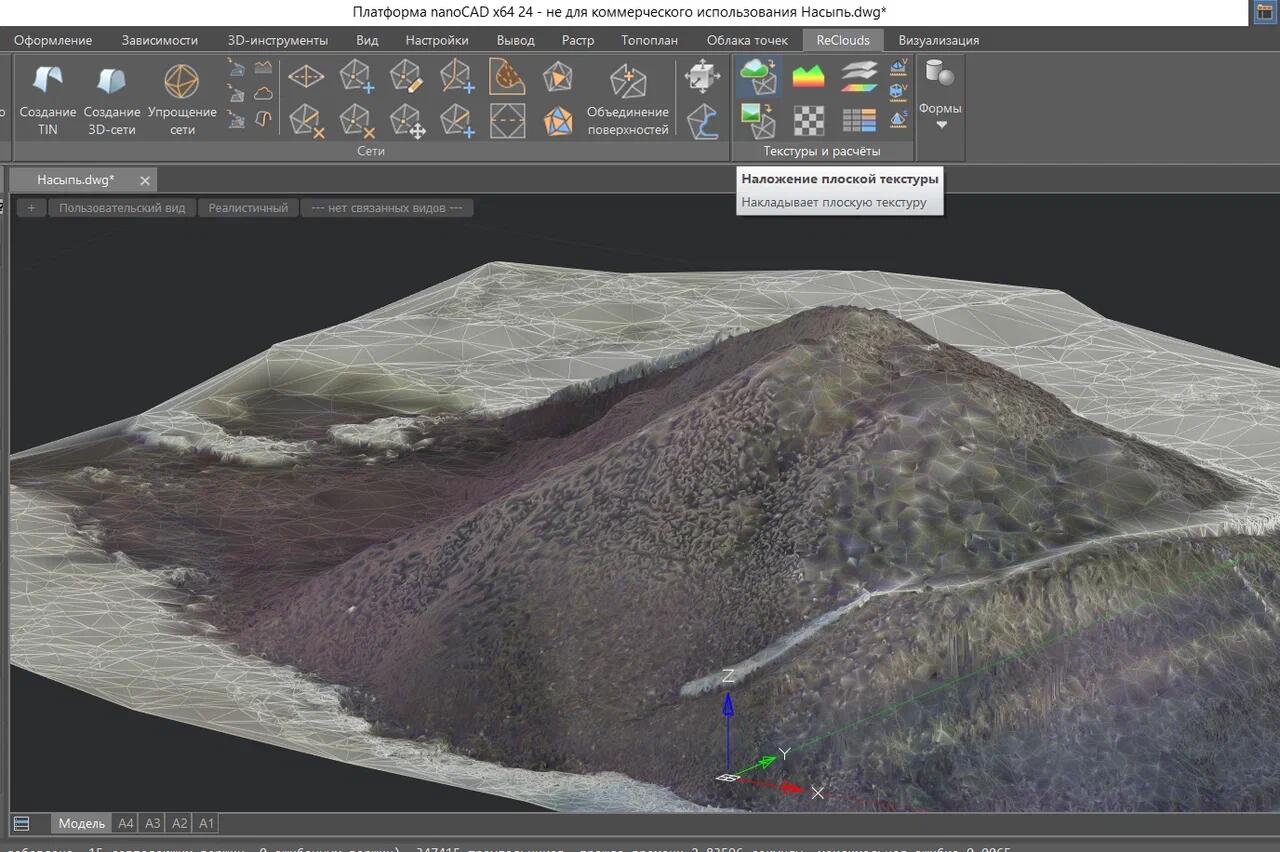
- Наложение текстур
-

Набор команд, создающих текстурированные поверхности в соответствии с задачами и исходными данными. Существует возможность наложения плоской текстуры, текстуры из растрового изображения и текстурного атласа.
- Редактирование сетей
-

Богатый набор инструментов редактирования построенных сетей. Включает оконтуривание, разрезание, классификацию, упрощение, заполнение разрывов и обрезку сети.
- Поиск ключевых линий
-

Команда ищет ключевые линии, такие как тальвеги, бровки
и т.п. Возможен поиск как по облаку точек, так и по поверхности.- Вписывание элементарных форм
-

Набор команд, создающих объекты (прямая, плоскость, сфера, цилиндр), вписанные в облако точек или сечение.
- Глобальный поиск форм
-

Команда, осуществляющая поиск элементарных форм (плоскость, сфера, цилиндр, конус, тор) в облаке точек.
- Поиск плоскостей и труб в облаке
-

Инструменты для поиска труб и плоскостей в облаке точек на основании заданных параметров.
- Создание трассы трубопровода
-

Визуализация и согласование осей сегментов трубопровода с построением единой трассы в виде
3D-полилинии . Автоматический расчет и определение поворотных точек.- Создание объектов по формам
-

Команда создает трехмерные векторные объекты на основе распознанной геометрии в облаке точек.
- Расчет разности поверхностей
-

Команда, позволяющая рассчитывать и создавать поверхность разности двух других поверхностей.
- Расчет объема
-

Набор инструментов для расчета объемов между моделью и облаком точек, внутри контура или между моделями. Вычисляется общий, балансовый объем, а также рассчитываются величины снимаемого и насыпаемого объемов.
- Расчет площади
-

Команда, предназначенная для определения площади участка поверхности. Рассчитываются как общая площадь, так и площади в проекциях на плоскости.
- Сравнение облака точек
-

Инструмент, позволяющий оценить степень совпадения двух облаков точек между собой или облака точек с моделью.
- Отображение отклонений
-

Режим отображения результатов выполненного сравнения с возможностью настройки дополнительных параметров.

























Конфигурация «Метрология»
Конфигурация «Метрология» — компонент nanoCAD Облака точек для автоматизации метрологического контроля в авиастроении, судостроении, автомобилестроении, сборке космических аппаратов, промышленном строительстве, металлургии
Задачи
- Контроль качества сборки агрегатов и изделий.
- Комплексная обработка измерений, полученных с разных типов сенсоров.
- Выявление отклонений от идеальной модели или нормативных параметров.
- Наблюдение за динамикой состояния объекта.
- Оценка вероятности аварийных ситуаций.
- Испытание изделий при критических изменениях условий эксплуатации.
- Проведение разметки для установки элементов конструкции в процессе
сборочно-монтажных работ. - Контроль целостности формы и расположения детали после ее монтажа.
- Визуализация измеренных данных и рассчитанных отклонений.
Ключевые возможности
- Сбор метрологических данных
-

Измерения могут быть выполнены различными типами приборов (электронные тахеометры и теодолиты, лазерные и фотограмметрические сканеры, а также специализированное измерительное оборудование: лазерные радары, высокоточные трекеры, измерительные руки, КИМ и др.).
- Регистрация всей поступающей информации
-

В базе измерений фиксируется вся информация, поступающая из подключенных приборов. Помимо пространственных координат, регистрируются время и параметры окружающей среды: температура, влажность, давление, а при необходимости и такие показатели, как вибрация, уровень радиации, гравитации и пр.
- Широкий спектр форматов CAD-данных
-

Модели для оценки и сравнения могут быть загружены из обширного перечня форматов представления
CAD-данных . Наряду с базовым для Платформы nanoCAD форматом *.dwg, этот набор включает в себя множество поддерживаемых Платформой векторных форматов представления пространственных данных.- Управление видимостью объектов
-

Специализированный раздел метрологической панели позволяет настраивать режим отображения и разделять данные по категориям, типам и другим критериям с помощью формирования групп.
- Трансформация
-

Трансформация и преобразование моделей и объектов в проекте.
- Сравнение
-

Инструмент расчета отклонений между моделью и набором измерений, позволяющий визуализировать полученную информацию с помощью виджета отклонений.
- Автосравнение
-

Автоматический перерасчет результатов сравнения в случае изменения параметров модели или набора измерений.
- Определение взаимосвязей
-

Расчет взаимосвязей между объектами для обеспечения высокой точности и согласованности измерений.
- Отображение отклонений
-

Возможность отображения рассчитанного отклонения каждого измерения от эталонной модели и визуализация полученных данных с помощью создания выносок.
- Формирование отчета
-

Отображение результатов выполнения работы команд и инструментов конфигурации «Метрология» в виде отчета.









САПР-платформа
- Платформа nanoCAD не ниже 24 версии с дополнительным модулем «3D».
Операционная система
- Microsoft Windows 11 (64-разрядная).
- Microsoft Windows 10 (64-разрядная).
- Microsoft Windows 8.1 (64-разрядная).
Базы данных
Для работы с базами данных для облаков точек необходима установка расширения PostGis для PostgreSQL:
- PostgreSQL 10 + Postgis 3.2.3−2;
- PostgreSQL 12 + Postgis 3.3.2−1;
- PostgreSQL 14 + Postgis 3.3.2−2;
- PostgreSQL 15 + Postgis 3.3.2−2.
Процессор
- Минимальные требования: процессор с тактовой частотой 2 ГГц.
- Рекомендуется: процессор с тактовой частотой 3 ГГц и выше.
Оперативная память
- Минимальные требования: 16 Гб.
- Рекомендуется: 32 Гб и выше.
Разрешение экрана
- Минимальные требования: 1280×1024.
- Рекомендуется: 1920×1080.
Видеоадаптер
- Минимальные требования: графический процессор с объемом видеопамяти 1 Гб.
- Рекомендуется: графический процессор с объемом видеопамяти 4 Гб, поддерживающий OpenGL 2.1 или DirectX 11.
Пространство на жестком диске
Для работы с большими облаками точек необходимо при выборе жесткого диска учитывать их объем и количество. Оценка объема данных облака точек может осуществляться по следующей таблице:
Объем точек в облаке |
Размер в мегабайтах на жестком диске |
1 млн |
16,02 |
100 млн |
1611,56 |
1 млрд |
16 313,00 |
2,5 млрд |
40 782,50 |
Примечание
Для ускорения работы хранить облака точек рекомендуется
Сеть
На сервере лицензий и всех рабочих станциях, где будут работать приложения, использующие сетевое лицензирование, должен быть запущен протокол TCP/IP.
Постоянная лицензия
Дополнительные модули
Подписка на обновления
Обновление
Срочная лицензия
Дополнительные модули
2017 | ||
|
4
дек
|
nanoCAD Облака точек: первое отечественное решение для обработки данных лазерного сканирования | Подробнее |
2025 | ||
|
дек
|
«Северо-Западной |
Читать статью |
2018 | ||
|
дек
|
nanoCAD Облака точек: переход в 3D-образы Компания «Нанософт» пополнила технологическую линейку профессиональных продуктов серии nanoCAD новым программным решением, предназначенным для работы с данными |
Читать статью |